Standardmäßig wird der CAN-Bus mit zwei parallelen Datenleitungen aufgebaut, obwohl eine einzelne reichen würde. Durch die Vorhaltung von zwei Datenleitungen wird eine höhere Sicherheit bzw. geringere Ausfallwahrscheinlichkeit erreicht, da das Gesamtsystem noch funktioniert, wenn eine Datenleitung defekt oder unterbrochen sein sollte. An die beiden Datenleitungen werden die Steuergeräte hintereinander bzw. linear über kurze Stichleitungen angeschlossen. So funktioniert das lineare Bus-System auch dann noch, wenn ein Steuergerät vollkommen ausfällt, was beispielsweise bei einem ringförmigen Aufbau nicht möglich ist.
Aufgrund der linearen Vernetzung im CAN-Bus können Anzahl und Länge der Leitungen im Fahrzeug reduziert werden, was eine Einsparung an Gewicht und Kosten zur Folge hat.
In der Fahrzeugtechnik wird z.B. zwischen einem High-Speed-CAN-Bus mit einer maximalen Übertragungsrate (Baudrate) von bis zu 1 Mbit/s und einem Low-Speed-CAN-Bus von bis zu 125 kbit/s unterschieden.
Der High-Speed-CAN-Bus wird für den Teil der Steuergeräte benutzt, der wichtige Informationen sehr schnell austauschen muss, wie z. B. Motorelektronik, Airbag oder ABS. Über den Low-Speed-CAN-Bus kommunizieren die Komfortsysteme, d. h. Klimasteuerung, Anzeigesysteme oder Türsteuergeräte. Man spricht aufgrund der hohen Geschwindigkeiten im CAN-Bus von Echtzeit-Kommunikation.
Kurz gesagt:
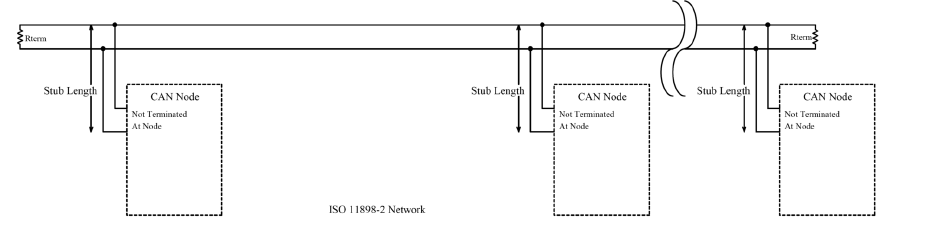
•Lineare Topologie (reduziert die Anzahl und Länge der Kabel in Fahrzeugen)
•Multi-Master-Kommunikation
•Carrier Sense Multiple Access/Kollision Resolution (CSMA/CR)
•CAN-Bus-Systeme werden mit zwei parallelen Datenkabeln (Differenzsignal) aufgebaut
•Die logische "1" ist rezessiv und die logische "0" dominiert (Wired-AND)
•Bei höheren Baud-Raten sind an den Enden Abschlusswiderstände erforderlich (z.B. 120 Ω), um Reflexionen zu vermeiden