Der LIN-Bus (Local Interconnect Network) wurde entwickelt, um die Kosten der Vernetzung im Automobil weiter zu senken. Er soll die vorhandenen und bewährten Bussysteme ergänzen und überall dort zum Einsatz kommen, wo lediglich geringe Datenmengen zuverlässig übertragen werden müssen.
So wird der LIN-Bus meist im Komfortbereicht eingesetzt und z.B. zur Ansteuerung von Stellmotoren, Schaltern oder Beleuchtungselementen verwendet. Die Architektur des Busses erlaubt es, die nötige Buslogik einfach in Hardware abzubilden. Viele Mikrocontroller sind so in der Lage, mit der UART oder SCI-Schnittstelle einen LIN-Bus zu betreiben, besondere Schnittstellen Controller sind nicht erforderlich.
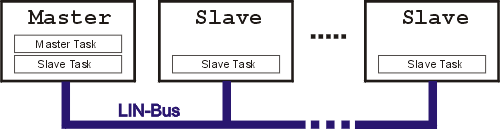
Die Kommunikation auf dem LIN-Bus folgt dem Master-Slave-Prinzip. Ein Master initiiert die Kommunikation mit einem oder mehreren Slaves. Die Kommunikation auf dem Bus kann nur stattfinden, wenn ein Master verbunden ist. Dieser veranlasst die eingerichteten Slaves nacheinander Ihre Daten zu senden. Ein Slave kann nicht von sich aus mit der Übermittlung von Daten beginnen.
Die größte Schwachstelle eines LIN-Busses ist somit der Master. Wenn dieser ausfällt, kommt die Kommunikation auf dem Bus zum erliegen. Außerdem benötigt der Master Kenntnis über alle im Bus vorhandenen Slaves, damit er sie zyklisch oder anhand einer Scheduler-Tabelle abfragen kann.
Der LIN-Bus wurde von einem Firmenkonsortium spezifiziert. Die aktuelle Spezifikation kann auf der Web-Seite abgerufen werden. Diese legt nicht nur fest, wie die physikalische Übertragung erfolgt, sondern gibt auch ein Transportprotokoll und den Aufbau der höheren Kommunikationsschichten vor.